"Просте завдання для дитини, але надзвичайно складне для робота". У Британії роботизовану руку навчили брати предмети, не гублячи й не ламаючи їх
Розробники вважають, що їхня технологія допоможе під час розроблення недорогих роботів
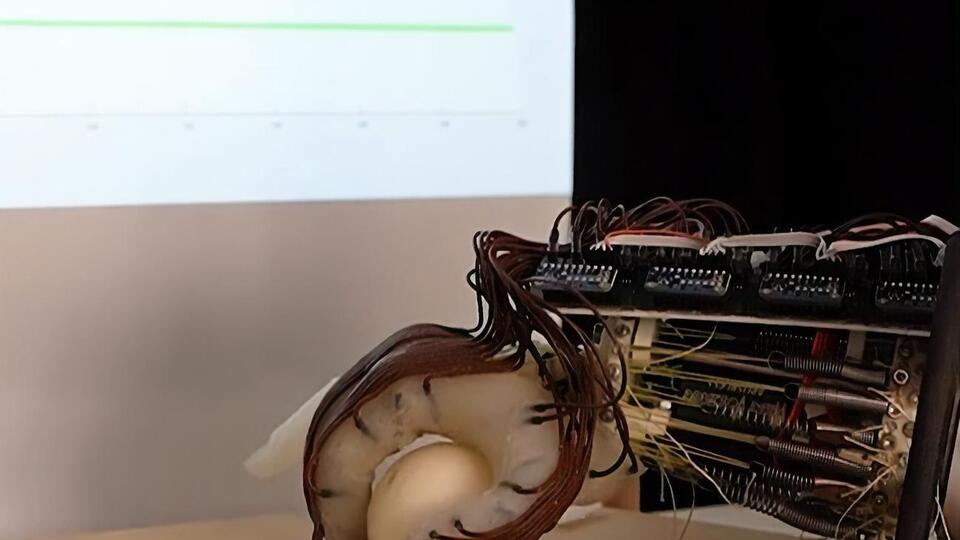
Скріншот: University of Cambridge / Facebook
Учені Кембриджського університету розробили роботизовану руку, яка може захоплювати різні предмети й не кидати їх.
Про це пресслужба університету повідомила 12 квітня.
У релізі йдеться, що м'яка роботизована рука – недорога й енергоефективна (її надрукували на 3D-принтері). Вона не може рухати пальцями, але водночас уміє захоплювати й утримувати предмети лише за допомогою рухів зап'ястя й використовуючи інформацію датчиків на її "шкірі".
Тактильні датчики дають роботизованій руці уявлення про те, наскільки добре відбувається захоплення, тому вона може розуміти, коли предмет починає зісковзувати, ідеться в повідомленні.
"Такий тип пасивного руху робить робота набагато простішим в управлінні і набагато енергоефективнішим, ніж роботи з повністю моторизованими пальцями. За словами дослідників, їхню адаптивну конструкцію можна використати під час розроблення недорогих роботів, здатних рухатися природніше й навчатися захоплення широкого спектра об'єктів", – пояснили в університеті.
Відтворити спритність людської руки дуже складно, і більшість роботів не в змозі виконувати завдання, із якими легко можуть впоратися діти, зазначено в релізі.
"Наприклад, люди інстинктивно знають, із якою силою потрібно брати яйце, але для робота це складне завдання: занадто велика сила – і яйце може розбитися, занадто маленька – і робот може його впустити. Окрім того, для створення повністю керованої руки робота з моторами для кожного суглоба кожного пальця потрібна значна кількість енергії", – повідомили автори релізу.
Робот навчався методом спроб і помилок і дізнався, який спосіб захоплення буде успішним: він тренувався на пластикових кульках, а потім спробував схопити різні предмети, включно з персиком, комп'ютерною мишкою і рулоном пухирчастої плівки. Під час цих випробувань рука змогла успішно захопити 11 із 14 об'єктів.
Відео роботи руки пресслужба університету опублікувала у Facebook.
"Це просте завдання для маленької дитини, але надзвичайно складне для робота", – зазначають у ролику, коли роботизована рука піднімає пластикову кульку.

Як читати ”ГОРДОН” на тимчасово окупованих територіях
Читати

